
계단이나 바위같이 일상생활의 다양한 장애물을 극복할 수 있는 바퀴(휠)와 이동체 로봇 기술이 한국 연구진에 의해 개발됐다. Một đội nghiên cứu Hàn Quốc đã phát triển thành công công nghệ bánh xe biến hình và robot di động có thể vượt qua các chướng ngại vật trên đường đi trong cuộc sống hàng ngày như cầu thang hoặc đá gập ghềnh.
한국기계연구원(기계연)은 2일 액체 방울의 표면장력 원리를 모사해 강성이 자유롭게 변하는 모핑 휠을 세계 최초로 개발하고 실제 이동체에 적용하는 데 성공했다고 밝혔다.
Viện Máy móc và Vật liệu Hàn Quốc (KIMM) cho biết vào ngày 2 tháng 9 rằng họ đã mô phỏng các hiện tượng bề mặt của chất lỏng để phát triển bánh xe biến hình đầu tiên trên thế giới có thể tự do thay đổi độ cứng và áp dụng nó vào các phương tiện di chuyển.
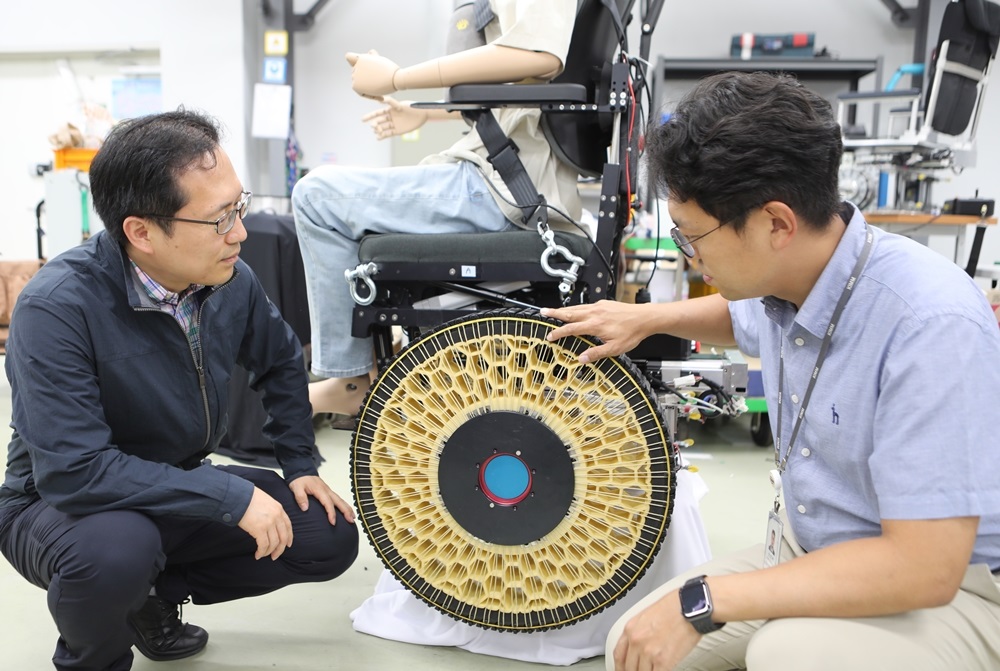
기계연 AI로봇연구소 첨단로봇연구센터의 박동일 센터장과 송성혁 책임연구원이 이끄는 팀이 개발한 모핑 휠은 복잡한 기계 장치나 센서 없이 강성을 쉽게 바꿀 수 있는 바퀴 및 모듈화 시스템이다.
Được phát triển bởi đội nghiên cứu từ Trung tâm nghiên cứu robot tiên tiến thuộc KIMM, loại bánh xe biến hình này cho phép thay đổi độ cứng dễ dàng mà không yêu cầu các thiết bị cơ học hoặc cảm biến phức tạp.
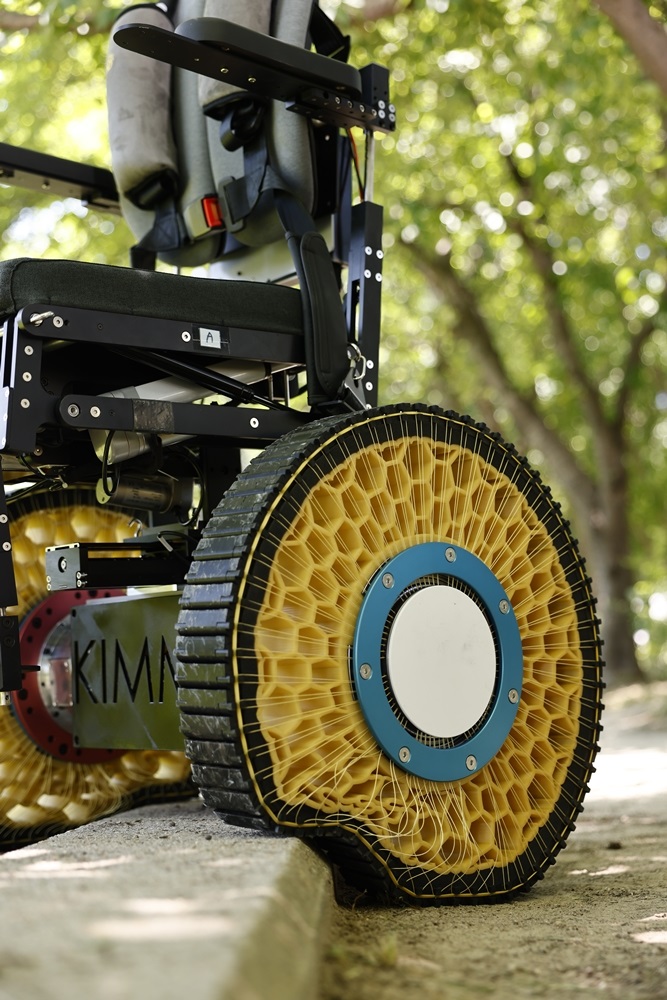
기존 기술은 평지 주행 시에도 휠에 지속적인 큰 변형이 발생해 주행 효율과 안정성이 낮고 소음도 커지는 한계가 있었다. 연구팀이 개발한 휠은 강성을 원하는 대로 조절할 수 있어 평지 고속 주행 시에는 일반적인 휠과 동일한 강성을 유지하다가 장애물이 있는 경우에만 실시간으로 휠을 말랑하게 바꿔 장애물을 극복할 수 있도록 했다.
Các loại bánh xe biến hình cũ thường bị hạn chế ngay cả khi di chuyển trên bề mặt phẳng vì chúng bị biến dạng lớn, do đó làm giảm hiệu quả và độ an toàn khi lái xe và tăng tiếng ồn. Tuy nhiên, với loại bánh xe biến hình mới nhất, người dùng có thể thay đổi độ cứng theo ý muốn để chúng duy trì độ cứng tương tự như bánh xe thông thường khi di chuyển nhanh trên bề mặt phẳng và làm cho bánh xe thay đổi được hình dạng khi vượt qua chướng ngại vật.
연구팀은 지난해 10월 모핑 휠의 메커니즘 검증을 완료하고 최근 바위나 18cm 높이의 계단을 극복할 수 있는 투휠 휠체어 등 다양한 이동체에 손쉽게 적용할 수 있는 모듈화 기술도 개발했다.
Vào tháng 10 năm ngoái, đội nghiên cứu trong nước đã hoàn tất cuộc kiểm tra cơ chế bánh xe biến hình và gần đây đã phát triển thêm công nghệ mô-đun hóa nhằm dễ dàng áp dụng loại bánh xe này cho các phương tiện di chuyển như xe lăn hai bánh có thể vượt qua đá hoặc cầu thang cao 18 cm.
연구팀은 “이번에 개발한 모핑 휠은 기존 휠의 장점인 높은 이동 효율은 유지하면서 휠의 한계점이었던 장애물 극복까지 구현이 가능하다는 점에서 의의가 있다”며 “향후 장애물 극복이 가능한 휠체어 및 다양한 이동 로봇, 탑승형 운송 수단 등 광범위하게 활용할 것으로 기대된다”고 밝혔다.
“Bánh xe biến hình mà chúng tôi mới phát triển có thể duy trì hiệu quả di chuyển cao của bánh xe thông thường trong khi vượt qua chướng ngại vật. Chúng tôi mong đợi loại bánh xe biến hình này được sử dụng rộng rãi như xe lăn, robot di chuyển và phương tiện giao thông”, theo đội nghiên cứu.
한편, 이번 연구는 로봇 전문 학술지 ‘사이언스 로보틱스’ 8월호의 표지 논문으로 게재됐다. Mặt khác, kết quả nghiên cứu này đã được đăng tải trên tạp chí khoa học “Science Robotics” – tháng 8/2024 của Mỹ.
샤를 오두앙 기자 caudouin@korea.kr
사진 = 한국기계연구원
Bài viết từ Charles Audouin, caudouin@korea.kr


{kind=link}